JavaScript路径规划可视化系统:A*算法与TSP问题解决方案
路径规划可视化系统和算法说明
这是一个基于 javascript 的路径规划可视化系统,支持交互式地创建、编辑和规划路径。系统实现了 A* 算法用于最短路径搜索,并使用改进的近似算法解决旅行商问题(TSP)。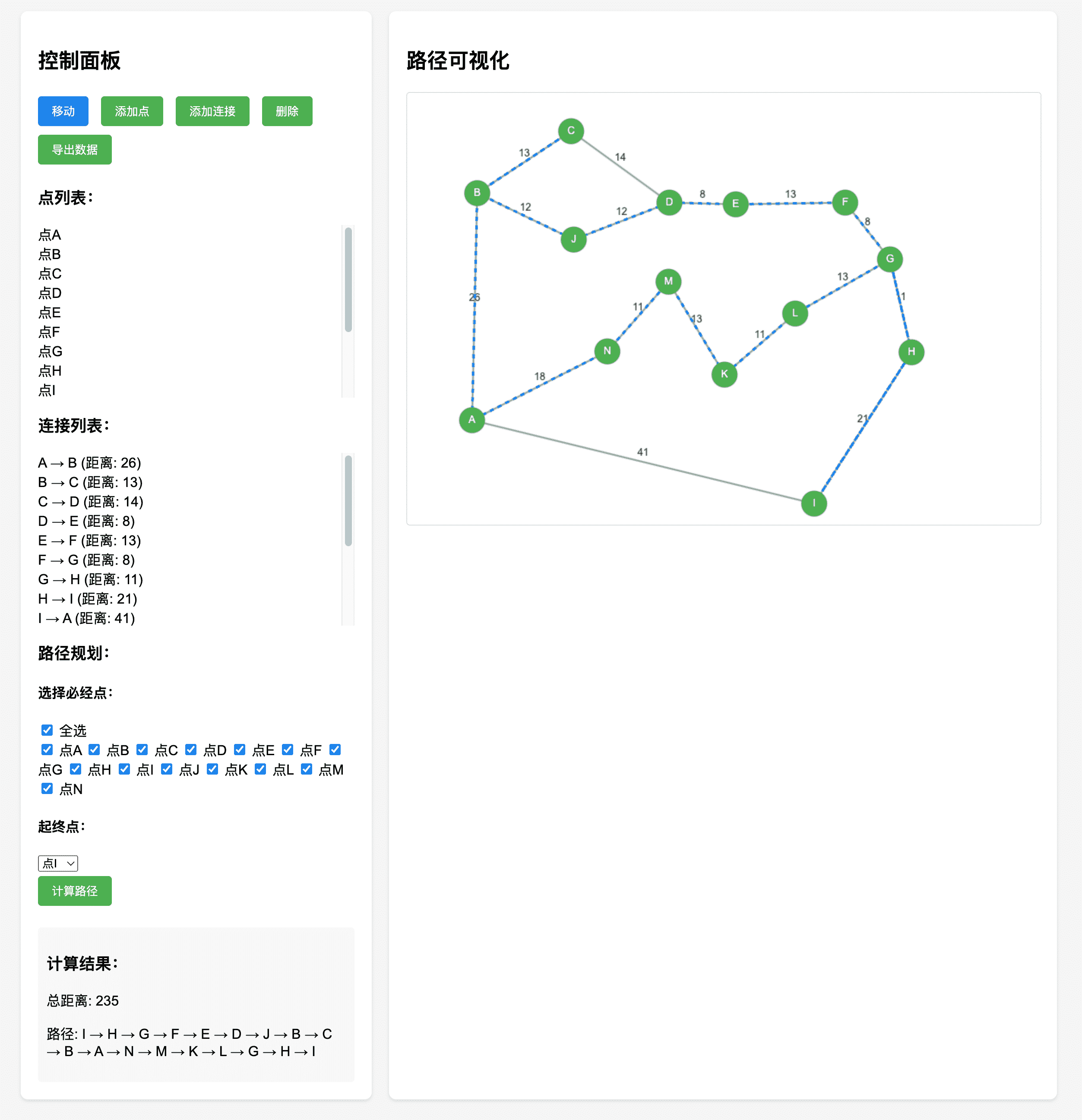
功能特点
📍 交互式点位管理
- 可视化添加、移动和删除路径点
- 动态连接点位并自动计算距离
- 支持拖拽调整点位位置
🛣️ 智能路径规划
- 基于 A* 算法的最短路径搜索
- 改进的 TSP 问题解决方案
- 3-opt 优化算法提升路径质量
💡 用户友好界面
- 清晰的路径可视化展示
- 实时距离计算和显示
- 支持选择必经点和起终点
- 导出路径数据功能
使用方法
打开系统
- 使用现代浏览器打开
index.html文件
- 使用现代浏览器打开
基本操作
- 移动模式:选择并拖拽已有点位
- 添加点位:点击”添加点”按钮,然后在画布上点击添加新点位
- 添加连接:点击”添加连接”按钮,然后依次选择两个点位建立连接
- 删除:点击”删除”按钮,然后点击要删除的点位或连接
路径规划
- 在控制面板中选择必经点
- 指定起终点
- 点击”计算路径”按钮获取最优路径
数据导出
- 点击”导出数据”按钮
- 复制生成的预置数据代码
技术实现
- 前端:原生 JavaScript + HTML5 Canvas
- 算法:
- A* 算法用于最短路径搜索
- 改进的最近邻算法解决 TSP 问题
- 3-opt 局部搜索优化
route.js 使用说明
route.js 提供了路径规划的核心功能,主要通过 PathPlanner 类实现:
1 | // 创建规划器实例 |
主要功能:
路径搜索
- 使用 A* 算法计算任意两点间的最短路径
- 自动缓存计算结果提升性能
- 支持启发式函数优化搜索效率
TSP 求解
- 使用改进的最近邻算法构造初始解
- 支持必经点约束
- 通过多次随机起点优化结果质量
路径优化
- 实现 3-opt 局部搜索
- 自动优化路径顺序
- 保证起终点约束
算法适用性说明
本系统的路径规划算法具有以下特点:
起终点处理
- 支持指定固定的起终点
- 起点和终点必须为同一个点
- 规划路径将从起点出发并最终返回该点
路径特性
- 允许重复经过同一个点
- 允许重复使用同一条连接
- 优先选择总距离最短的路径方案
约束条件
- 必经点:可以选择多个必经点,算法保证会经过所有选中的点
- 连接限制:只能通过已建立连接的路径进行移动
- 距离计算:基于点位间实际连接的距离,而非直线距离
优化目标
- 主要优化目标是最小化总路径长度
- 在满足必经点要求的前提下寻找近似最优解
- 通过 3-opt 优化提升路径质量
系统要求
- 现代浏览器(Chrome、Firefox、Safari、Edge 等)
- 支持 HTML5 Canvas
- JavaScript 启用
注意事项
- 建议在点位数量适中的情况下使用,过多点位可能影响性能
- 路径规划结果为近似最优解,不保证全局最优
- 拖拽点位时会自动更新相关连接的距离
此文章版权归houxiaozhao所有,如有转载,请注明来自原作者
相关推荐

2022-03-09
API安全防护:接口签名验证与防重放攻击实现
为了保证 api 接口安全,防止数据被篡改,需要设计 api 签名机制。以下为签名过程 接口签名算法1. 获取参数 一共 4 部分的参数 path query body 时间戳 {timestamp} 随机字符串 {nocestr} 2. 合并参数,然后排序(body 中可能嵌套多层 json,需要递归对对象属性排序,数组的顺序不变)3. 对上一步对象转为字符串,然后 md5 加密4. 再用用户 token 为 key,对 md5 加密后的字符串用 hmacSHA512 加密得到 sign5. http 请求 header 中添加 sign、timestamp、nocestr前端签名实现如下12345678import hmacSHA512 from "crypto-js/hmac-sha512";import md5 from "crypto-js/md5";const timestamp = +new Date();const nocestr = generateNoceStr();const data =...

2019-05-04
Vue.js与Cordova构建混合应用:从环境搭建到插件集成
准备开发环境 前端开发环境 Node.js LTS @vue/cli cordova yarn 推荐 编辑器 VS code(墙裂推荐) 各种插件 Android 环境(需要编译 Android 软件) 安装 JDK 设置环境变量 安装 SDK?Android Studio - 设置环境变量https://blog.csdn.net/pupilxiaoming/article/details/77801398 ###项目搭建 使用脚手架生成基础项目 cordova 项目 cordova create demo cordova platform add android cordova run android 目录结构 www 存放网页代码 plugins 插件 platforms 平台 res 资源 调试chrome://inspect/#devices vue 项目 vue create demo yarn npm run serve 目录结构 public 静态资源 src 源码 安装一个 UI 框架...

2021-04-07
Node.js 错误处理实用指南:Promise与Async/Await最佳实践
Node.js 错误处理最佳实践使用 Promise 捕获错误123456789101112131415161718192021222324let func = function (n) { return new Promise((resolve, reject) => { resolve(n * n); });};func(2) .then(res => { console.log(res); return func(res); }) .then(res => { console.log(res); throw new Error("Error"); }) .then(res => { console.log(res); return func(res); }) .catch(err => { console.log(err); }) ...
2023-02-02
Node.js中Buffer和Stream的高效转换:提升数据处理性能
Stream to Buffer12345678function streamToBuffer(stream) { return new Promise((resolve, reject) => { let buffers = []; stream.on("error", reject); stream.on("data", data => buffers.push(data)); stream.on("end", () => resolve(Buffer.concat(buffers))); });} Buffer to Stream1234567let Duplex = require("stream").Duplex;function bufferToStream(buffer) { let stream = new Duplex(); stream.push(buffer); ...

2017-05-05
React Native vs Ionic 移动应用开发对比与实践
react native 开发 IOS 手机应用基本方法及其与 IONIC 开发的对比1. react-native 介绍react-native 是一款基于 js 框架 React.js 来开发 IOS 和 Android 原生 App 的开源框架, Learn once,write anywhere NR 和 react.js 关系 RN 和 react.js 公用一些抽象层,比如语法标签等,但还是有许多差异,而且目标平台不同。 案例:http://reactnative.cn/cases.html ionic 与 RN:ionic 是 webview,NR 是以 js 方式开发的原生应用 2. 搭建开发环境macOS =>iOS 安装 Homebrew==dpkg 1/usr/bin/ruby -e "$(curl -fsSL https://raw.githubusercontent.com/Homebrew/install/master/install)" 安装 node 1brew...

2017-01-18
AngularJS和Ionic应用性能优化实践与技巧
angular 性能优化 使用$watchCollection(obj, listener),不要使用$watch()或者$watchGroup(); 使用 one-time binding 1{{::user.first_name}} 使用 Track by以前的用法ng-repeat="user in users"修改后的用法ng-repeat="user in users track by user.id"如果 users 有 id 的话或者ng-repeat="user in users track by $index"如果没有 id 不要使用 console.log(),而是用$log The $log service has several log levels .info .debug and .error. 禁用...